Кінетична та потенційна енергія (2) - Реферат Закон збереження імпульсу, кінетична та потенційні енергії, потужність сили Закон збереження кінетичної енергії
Гл.2-3, §9-11
План лекції
Робота та потужність
Закон збереження імпульсу.
Енергія. Потенційна та кінетична енергії. Закон збереження енергії.
Робота та потужність
Коли під дією деякої сили тіло здійснює переміщення, то дія сили характеризується величиною, що називається механічною роботою.
Механічна робота- міра дії сили, внаслідок якого тіла здійснюють переміщення.
Робота незмінної сили.Якщо тіло рухається прямолінійно під дією постійної сили, яка становить деякий кут з напрямком переміщення  (рис.1), робота дорівнює добутку цієї сили на переміщення точки докладання сили та на косинус кута між векторами і ; або робота дорівнює скалярному добутку вектора сили на вектор переміщення:
(рис.1), робота дорівнює добутку цієї сили на переміщення точки докладання сили та на косинус кута між векторами і ; або робота дорівнює скалярному добутку вектора сили на вектор переміщення:


Робота змінної сили.Щоб знайти роботу змінної сили, пройдений шлях розбивають на велику кількість малих ділянок так, щоб їх можна було вважати прямолінійними, а діючу в будь-якій точці даної ділянки силу - постійної.
Елементарна робота (тобто. робота на елементарному ділянці ) дорівнює , а вся робота змінної сили по всьому шляху S перебуває інтегруванням: .
Як приклад роботи змінної сили розглянемо роботу, що здійснюється під час деформації (розтягування) пружини, що підпорядковується закону Гука.


Якщо початкова деформація х 1 =0, то .
При стисканні пружини відбувається така сама робота.
Г 
 рафічне зображення роботи (рис.3).
рафічне зображення роботи (рис.3).
На графіках робота чисельно дорівнює площі заштрихованих фігур.
Для характеристики швидкості виконання роботи вводять поняття потужності.
Потужність постійної сили чисельно дорівнює роботі, яку виконує ця сила за одиницю часу.
1 Вт-це потужність сили, яка за 1 с здійснює 1 Дж роботи.
У разі змінної потужності (за малі однакові проміжки часу відбувається різна робота) вводиться поняття миттєвої потужності:
де  швидкість точки докладання сили.
швидкість точки докладання сили.
Т.о. потужність дорівнює скалярному добутку сили на швидкість  точки її застосування.
точки її застосування.
Т.к. 
2. Закон збереження імпульсу.
Механічною системою називається сукупність тіл, виділена на розгляд. Тіла, що утворюють механічну систему, можуть взаємодіяти як між собою, так і з тілами, що не належать даній системі. Відповідно до цього сили, що діють на тіла системи, поділяють на внутрішні та зовнішні.
внутрішніминазиваються сили, з якими тіла системи взаємодіють між собою
Зовнішніминазиваються сили, зумовлені впливом тіл, що не належать даній системі.
Замкнутою(або ізольованою) називається система тіл, на яку не діють зовнішні сили.
Для замкнутих систем виявляються постійними (зберігаються) три фізичні величини: енергія, імпульс і момент імпульсу. Відповідно до цього мають місце три закони збереження: енергії, імпульсу, моменту імпульсу.
Розглянемо систему, що складається з 3-х тіл, імпульси яких  і на які діють зовнішні сили (рис. 4). Відповідно до закону Ньютона, внутрішні сили попарно рівні і протилежно спрямовані:
і на які діють зовнішні сили (рис. 4). Відповідно до закону Ньютона, внутрішні сили попарно рівні і протилежно спрямовані:
Внутрішні сили:
Запишемо основне рівняння динаміки для кожного з цих тіл і складемо почленно ці рівняння

Для N тел:
 .
.
Сума імпульсів тіл, що становлять механічну систему, називається імпульсом системи:

Т.ч., похідна за часом імпульсу механічної системи дорівнює геометричній сумі зовнішніх сил, що діють на систему,
Для замкнутої системи  .
.
Закон збереження імпульсу: імпульс замкнутої системи матеріальних точок залишається незмінним.
З цього закону випливає неминучість віддачі при стрільбі з будь-якої зброї. Куля або снаряд в момент пострілу одержують імпульс, спрямований в один бік, а гвинтівка або знаряддя одержують імпульс, спрямований протилежно. Для зменшення цього ефекту застосовують спеціальні противідкатні пристрої, в яких кінетична енергія зброї перетворюється на потенційну енергію пружної деформації та у внутрішню енергію противідкатного пристрою.
Закон збереження імпульсу лежить в основі руху суден (підводних човнів) за допомогою гребних коліс і гвинтів і водометних суднових двигунів (насос всмоктує забортну воду і відкидає її за корму). При цьому деяка кількість води відкидається назад, несучи з собою певний імпульс, а судно набуває такого ж імпульсу, спрямованого вперед. Цей закон лежить в основі реактивного руху.
Абсолютно непружний удар- Зіткнення двох тіл, в результаті якого тіла об'єднуються, рухаючись далі як єдине ціле. При такому ударі механічна енергія частково або повністю переходить у внутрішню енергію тіл, що стикаються, тобто. закон збереження енергії не виконується, виконується лише закон збереження імпульсу.
![]() ,
,
![]()
Теорія абсолютно пружних і абсолютно пружних ударів використовується в теоретичній механіці для розрахунку напруги та деформації, викликаних в тілах ударними силами. При вирішенні багатьох завдань удару часто спираються на результати різноманітних стендових випробувань, аналізуючи та узагальнюючи їх. Теорія удару широко використовується під час розрахунків вибухових процесів; застосовується у фізиці елементарних частинок при розрахунках зіткнень ядер, при захопленні частинок ядрами та інших процесах.
Великий внесок у теорію удару зробив російський академік Я.Б.Зельдович, який, розробляючи в 30-х роках фізичні основи балістики ракет, вирішив складне завдання удару тіла, що летів з великою швидкістю по поверхні середовища.
Закон збереження енергії стверджує, що енергія тіла ніколи не зникає і не з'являється знову, вона може лише перетворюватися з одного виду на інший. Цей закон є універсальним. У різних розділах фізики він має своє формулювання. Класична механіка розглядає закон збереження механічної енергії.
Повна механічна енергія замкнутої системи фізичних тіл, між якими діють консервативні сили, є постійною величиною. Так формулюється закон збереження енергії у механіці Ньютона.
Замкненою, чи ізольованою, прийнято вважати фізичну систему, яку не діють зовнішні сили. У ній не відбувається обміну енергією з навколишнім простором, і власна енергія, яку вона володіє, залишається незмінною, тобто зберігається. У такій системі діють лише внутрішні сили і тіла взаємодіють один з одним. У ній можуть відбуватися лише перетворення потенційної енергії на кінетичну і навпаки.
Найпростіший приклад замкнутої системи – снайперська гвинтівка та куля.
Види механічних сил

Сили, що діють усередині механічної системи, прийнято розділяти на консервативні та неконсервативні.
Консервативнимивважаються сили, робота яких залежить від траєкторії руху тіла, якого вони прикладені, а визначається лише початковим і кінцевим становищем цього тіла. Консервативні сили називають також потенційними. Робота таких сил по замкнутому контурі дорівнює нулю. Приклади консервативних сил сила тяжіння, сила пружності.
Всі інші сили називаються неконсервативними. До них відносяться сила тертя та сила опору. Їх називають також дисипативнимисилами. Ці сили за будь-яких рухах у замкнутої механічної системі здійснюють негативну роботу, і за їх дії повна механічна енергія системи зменшується (диссипирует). Вона перетворюється на інші, не механічні види енергії, наприклад, в теплоту. Тому закон збереження енергії в замкнутій механічній системі може виконуватися тільки якщо неконсервативні сили в ній відсутні.
Повна енергія механічної системи складається з кінетичної та потенційної енергії та є їх сумою. Ці види енергій можуть перетворюватися один на одного.
Потенційна енергія

Потенційну енергію називають енергією взаємодії фізичних тіл чи його частин між собою. Вона визначається їх взаємним розташуванням, тобто, відстанню з-поміж них, і дорівнює роботі, яку треба зробити, щоб перемістити тіло з точки відліку до іншої точки в полі дії консервативних сил.
Потенційну енергію має будь-яке нерухоме фізичне тіло, підняте на якусь висоту, тому що на нього діє сила тяжіння, що є консервативною силою. Таку енергію має вода на краю водоспаду, санки на вершині гори.
Звідки ця енергія з'явилася? Поки фізичне тіло піднімали на висоту, зробили роботу та витратили енергію. Ось ця енергія і запаслася у піднятому тілі. І тепер ця енергія готова до роботи.
Величина потенційної енергії тіла визначається висотою, де знаходиться тіло щодо якогось початкового рівня. За точку відліку ми можемо прийняти будь-яку обрану нами точку.
Якщо розглядати положення тіла щодо Землі, то потенційна енергія тіла лежить на поверхні Землі дорівнює нулю. А на висоті h вона обчислюється за такою формулою:
Е п = m ɡ h ,
де m - маса тіла
ɡ - прискорення вільного падіння
h - Висота центру мас тіла щодо Землі
ɡ = 9,8 м/с 2
При падінні тіла з висоти h 1 до висоти h 2 сила тяжіння здійснює роботу. Ця робота дорівнює зміні потенційної енергії та має негативне значення, оскільки величина потенційної енергії при падінні тіла зменшується.
A = - ( E п2 - E п1) = - ∆ E п ,
де E п1 - Потенційна енергія тіла на висоті h 1 ,
E п2 - потенційна енергія тіла на висоті h 2 .
Якщо ж тіло піднімають на якусь висоту, то виконують роботу проти тяжкості. І тут вона має позитивне значення. А величина потенційної енергії тіла зростає.
Потенційною енергією володіє і пружно деформоване тіло (стиснена або розтягнута пружина). Її величина залежить від жорсткості пружини і від того, на яку довжину її стиснули або розтягнули, і визначається за такою формулою:
Е п = k · (∆x) 2 / 2 ,
де k - Коефіцієнт жорсткості,
∆x - Подовження або стиснення тіла.
Потенційна енергія пружини може виконувати роботу.
Кінетична енергія

У перекладі з грецької «кінема» означає «рух». Енергія, яку фізичне тіло отримує внаслідок свого руху, називається кінетичної. Її величина залежить від швидкості руху.
Футбольний м'яч, що котиться полем, скотилися з гори і продовжують рухатися санки, випущена з лука стріла - всі вони мають кінетичну енергію.
Якщо тіло перебуває у стані спокою, його кінетична енергія дорівнює нулю. Як тільки на тіло діє сила або кілька сил, воно почне рухатися. А якщо тіло рухається, то сила, що діє на нього, здійснює роботу. Робота сили, під впливом якої тіло зі стану спокою перейде у рух і змінить свою швидкість від нуля до ν , називається кінетичною енергією тіла масою m .
Якщо ж у початковий момент часу тіло вже перебувало у русі, та його швидкість мала значення ν 1 , а в кінцевий момент вона дорівнювала ν 2 , то робота, виконана силою або силами, що діють на тіло, дорівнюватиме прирощенню кінетичної енергії тіла.
∆ E k = E k 2 - E k 1
Якщо напрямок сили збігається з напрямком руху, то відбувається позитивна робота, і кінетична енергія тіла зростає. А якщо сила спрямована у бік, протилежний до напрямку руху, то відбувається негативна робота, і тіло віддає кінетичну енергію.
Закон збереження механічної енергії
Еk 1 + Е п1= Е k 2 + Е п2
Будь-яке фізичне тіло, що знаходиться на якійсь висоті, має потенційну енергію. Але під час падіння воно цю енергію починає втрачати. Куди ж вона поділася? Виявляється, вона нікуди не зникає, а перетворюється на кінетичну енергію цього тіла.
Припустимо , на якійсь висоті нерухомо закріплений вантаж. Його потенційна енергія у цій точці дорівнює максимальному значенню.Якщо ми його відпустимо, він почне падати з певною швидкістю. Отже, почне набувати кінетичної енергії. Але водночас почне зменшуватись його потенційна енергія. У точці падіння кінетична енергія тіла досягне максимуму, а потенційна зменшиться до нуля.
Потенційна енергія м'яча, кинутого з висоти, зменшується, а кінетична енергія зростає. Санки, що перебувають у стані спокою на вершині гори, мають потенційну енергію. Їхня кінетична енергія в цей момент дорівнює нулю. Але коли вони почнуть котитися вниз, кінетична енергія збільшуватиметься, а потенційна зменшуватиметься на таку саму величину. А сума їх значень залишиться незмінною. Потенційна енергія яблука, що висить на дереві, при падінні перетворюється на його кінетичну енергію.
Ці приклади наочно підтверджують закон збереження енергії, який свідчить, що повна енергія механічної системи є величиною постійної . Величина повної енергії системи не змінюється, а потенційна енергія перетворюється на кінетичну і навпаки.
На яку величину зменшиться потенційна енергія, таку ж збільшиться кінетична. Їхня сума не зміниться.
Для замкнутої системи фізичних тіл справедлива рівність
E k1 + E п1 = E k2 + E п2,
де E k1 , E п1
- кінетична та потенційна енергії системи до будь-якої взаємодії, E k2 , E п2
- Відповідні енергії після нього.
Процес перетворення кінетичної енергії в потенційну і навпаки можна побачити, спостерігаючи за маятником, що розгойдується.
Натиснути на картинку
Перебуваючи у вкрай правому становищі, маятник наче завмирає. У цей момент його висота над точкою відліку максимальна. Отже, максимальна та потенційна енергія. А кінетична дорівнює нулю, тому що він не рухається. Але наступної миті маятник починає рух вниз. Зростає його швидкість, отже, збільшується кінетична енергія. Але зменшується висота, зменшується потенційна енергія. У нижній точці вона дорівнюватиме нулю, а кінетична енергія досягне максимального значення. Маятник пролетить цю точку і почне підніматися вгору ліворуч. Почне збільшуватись його потенційна енергія, а кінетична зменшуватиметься. І т.д.
Для демонстрації перетворень енергії Ісаак Ньютон вигадав механічну систему, яку називають колискою Ньютона або кулями Ньютона .
Натиснути на картинку
Якщо відхилити убік, а потім відпустити першу кулю, то її енергія та імпульс передадуться останньому через три проміжні кулі, які залишаться нерухомими. А остання куля відхилиться з такою ж швидкістю і підніметься на таку саму висоту, що й перша. Потім остання куля передасть свою енергію та імпульс через проміжні кулі першому і т.д.
Куля, відведена убік, має максимальну потенційну енергію. Його кінетична енергія у цей момент нульова. Почавши рух, він втрачає потенційну енергію і набуває кінетичної, яка в момент зіткнення з другою кулею досягає максимуму, а потенційна стає рівною нулю. Далі кінетична енергія передається другій, потім третій, четвертій і п'ятій кулях. Останній, отримавши кінетичну енергію, починає рухатися і піднімається на таку ж висоту, на якій знаходилася перша куля на початку руху. Його кінетична енергія в цей момент дорівнює нулю, а потенційна дорівнює максимальному значенню. Далі він починає падати і так само передає енергію куль у зворотній послідовності.
Так триває досить довго і могло б продовжуватись до нескінченності, якби не існувало неконсервативних сил. Але насправді в системі діють дисипативні сили, під впливом яких кулі втрачають свою енергію. Поступово зменшується їх швидкість та амплітуда. І, зрештою, вони зупиняються. Це підтверджує, що закон збереження енергії виконується лише у відсутності неконсервативних сил.
Якщо на систему діють лише консервативні сили, то можна для неї ввести поняття потенційної енергії. Яке-небудь довільне становище системи, що характеризується завданням координат її матеріальних точок, умовно приймемо за нульове. Робота, що здійснюється консервативними силами при переході системи з положення в нульове, називається потенційною енергією системиу першому положенні
Робота консервативних сил залежить від шляху переходу, тому потенційна енергія системи при фіксованому нульовому становищі залежить від координат матеріальних точок системи у положенні. Іншими словами, потенційна енергія системиUє функцією лише її координат.
Потенційна енергія системи визначена не однозначно, і з точністю до постійної постійної.Це свавілля неспроможна позначиться на фізичних висновках, оскільки перебіг фізичних явищ може залежати немає від абсолютних значень самої потенційної енергії, лише від її різниці у різних станах. Ці ж різниці від вибору постійної довільної не залежать.
консервативні, то А 12 = А 1О2 = А 1О + АО2 = А 1О – А 2О. За визначенням потенційної енергії U 1 = A 1O , U 2 = A 2O. Таким чином,
A 12 = U 1 – U 2 , (3.10)
тобто. робота консервативних сил дорівнює втраті потенційної енергії системи.
Та ж робота А 12 , як було показано раніше (3.7), може бути виражена через збільшення кінетичної енергії за формулою
А 12 = До 2 – До 1 .
Прирівнюючи їх праві частини, отримаємо До 2 – До 1 = U 1 – U 2 , звідки
До 1 + U 1 = До 2 + U 2 .
Сума кінетичної та потенційної енергії системи називається її повною енергією Е. Таким чином, Е 1 = Е 2 , або
E K+U= Const. (3.11)
У системі з одним лише консервативними силами повна енергія залишається незмінною. Можуть відбуватися лише перетворення потенційної енергії на кінетичну та назад, але повний запас енергії системи змінитися не може.Це становище називається законом збереження енергії у механіці.
Обчислимо потенційну енергію у деяких найпростіших випадках.
а) Потенційна енергія тіла у однорідному полі тяжкості.Якщо матеріальна точка, що знаходиться на висоті h, впаде на нульовий рівень (тобто рівень, для якого h= 0), то сила тяжіння зробить роботу A = mgh. Тому на висоті hматеріальна точка має потенційну енергію U = mgh + C, де З- Адитивна постійна. За нульовий можна прийняти довільний рівень, наприклад рівень підлоги (якщо досвід проводиться в лабораторії), рівень моря і т.д. Постійна Здорівнює потенційній енергії на нульовому рівні. Вважаючи її рівною нулю, отримаємо
U = mgh. (3.12)
б) Потенційна енергія розтягнутої пружини.Пружні сили, що виникають під час розтягування чи стиснення пружини, є центральними силами. Тому вони консервативні, і має сенс говорити про потенційну енергію деформованої пружини. Її називають пружною енергією. Позначимо через х розтягнення пружини,тобто. різниця x = l – l 0 довжин пружини в деформованому та недеформованому станах. Пружна сила Fзалежить лише від розтягування. Якщо розтягування xне дуже велике, то вона пропорційна йому: F = - kx(Закон Гука). При поверненні пружини з деформованого до недеформованого стану сила Fздійснює роботу
 .
.
Якщо пружну енергію пружини в недеформованому стані умовитися вважати рівною нулю, то
 . (3.13)
. (3.13)
в) Потенційна енергія гравітаційного тяжіння двох матеріальних точок.За законом всесвітнього тяжіння Ньютона гравітаційна сила тяжіння двох точкових тіл пропорційна добутку їх мас Mmі обернено пропорційна квадрату відстані між ними:
 ,(3.14)
,(3.14)
де G- гравітаційна постійна.
Сила гравітаційного тяжіння, як центральна сила, є консервативною. Для неї є сенс говорити про потенційну енергію. При обчисленні цієї енергії одну з мас, наприклад М, Можна вважати нерухомою, а іншу – що переміщається в її гравітаційному полі. При переміщенні маси mз нескінченності гравітаційні сили виконують роботу
 ,
,
де r- Відстань між масами Мі mу кінцевому стані.
Ця робота дорівнює втраті потенційної енергії:
 .
.
Зазвичай потенційну енергію у нескінченності U приймають рівною нулю. За такої угоди
 . (3.15)
. (3.15)
Розмір (3.15) негативна. Це має просте пояснення. Максимальної енергією маси, що притягуються, володіють при нескінченній відстані між ними. У цьому становищі потенційна енергія вважається рівною нулю. У будь-якому іншому становищі вона менша, тобто. негативна.
Припустимо тепер, що у системі поруч із консервативними силами діють також диссипативні сили. Робота всіх сил А 12 при переході системи з положення 1 в положення 2 по - колишньому дорівнює приросту її кінетичної енергії До 2
– До 1 . Але в даному випадку цю роботу можна подати у вигляді суми роботи консервативних сил  та роботи дисипативних сил
та роботи дисипативних сил  . Перша робота може бути виражена через спад потенційної енергії системи:
. Перша робота може бути виражена через спад потенційної енергії системи:  . Тому
. Тому
 .
.
Прирівнюючи цей вислів до збільшення кінетичної енергії, отримаємо
 , (3.16)
, (3.16)
де E = K + U- Повна енергія системи. Таким чином, у цьому випадку механічна енергія Есистеми не залишається постійною, а зменшується, оскільки робота дисипативних сил  негативна.
негативна.
Опис презентації з окремих слайдів:
1 слайд
Опис слайду:
Чи сформулюйте визначення роботи? Якою літерою позначається? У яких одиницях вимірюється? За яких умов робота позитивна? негативна? дорівнює нулю? Які сили називаються потенційними? Наведіть приклади? Чому дорівнює робота, яку виконує сила тяжіння? Силою пружності? Дайте визначення потужності. У яких одиницях вимірюється потужність? ЗАВДАННЯ ДЛЯ УСНОГО ОПИТУВАННЯ:
2 слайд

Опис слайду:
ЗАВДАННЯ ДЛЯ ПОВТОРЕННЯ ВИВЧЕНОГО МАТЕРІАЛУ: 1.Автомобіль масою 1000 кг, рухаючись рівноприскорено зі стану спокою, за 10 с від'їжджає на 200 м. Визначте роботу сили тяги, якщо коефіцієнт тертя дорівнює 0,05. Відповідь: 900 кДж 2. Трактор при оранці долає силу опору 8 кН, розвиваючи потужність 40 кВт. З якою швидкістю рухається трактор? Відповідь: 5 м/с 3. Тіло рухається вздовж осі ОХ під дією сили, залежність проекції якої від координати представлена на малюнку. Чому дорівнює робота сили на шляху 4м
3 слайд

Опис слайду:
Тема: Енергія. Кінетична енергія. Потенційна енергія. Закон збереження механічної енергії. Застосування законів збереження Цілі заняття: Освітня: ознайомитись із поняттям енергії; вивчити два види механічної енергії – потенційну та кінетичну; розглянути закон збереження енергії; розвинути навички розв'язання задач. Розвиваюча: сприяти розвитку мовлення, вчити аналізувати, порівнювати, сприяти розвитку пам'яті, логічного мислення. Виховна: допомога в самоактуалізації та самореалізації в навчальному процесі та майбутній професійній діяльності ПЛАН ЛЕКЦІЇ
4 слайд

Опис слайду:
1. Механічна енергія Механічна робота (А) – це фізична величина, що дорівнює добутку модуля діючої сили на шлях, пройдений тілом під дією сили та на косинус кута між ними А = F · S · cosα Одиниця вимірювання роботи в системі СІ – Дж (Джоуль ) 1Дж = 1Н · м.
5 слайд

Опис слайду:
Робота відбувається в тому випадку, якщо тіло рухається під дією сили! Розглянемо кілька прикладів.
6 слайд

Опис слайду:
Про тіла, які можуть зробити роботу, кажуть, що вони мають енергію. Енергія – це фізична величина, що характеризує здатність тіл виконувати роботу Одиниця виміру енергії у системі СІ – (Дж). Позначається літерою (Е)
7 слайд

Опис слайду:
2. Кінетична енергія Яка енергія тіла залежить від його швидкості? Для цього розглянемо рух тіла деякої маси m під дією постійної сили (це може бути одна сила або рівнодіє кількох сил), спрямованої вздовж переміщення.
8 слайд

Опис слайду:
Ця сила здійснює роботу А=F·S Відповідно до другого закону Ньютона F=m·a Прискорення тіла
9 слайд

Опис слайду:
Тоді Отримана формула пов'язує роботу результуючої сили, що діє на тіло, зі зміною величини Кінетична енергія тіла – це енергія руху. Кінетична енергія тіла - величина скалярна, яка залежить від модуля швидкості тіла, але не залежить від її спрямування. Тоді робота рівнодіючої всіх сил, що діють на тіло, дорівнює зміні кінетичної енергії тіла.
10 слайд

Опис слайду:
Це твердження називають теоремою про кінетичну енергію. Вона справедлива незалежно від цього, які сили діють тіло: сила пружності, сила тертя чи сила тяжкості. А роботу, необхідну для розгону кулі, здійснює сила тиску порохових газів. Так, наприклад, при метанні списа роботу виконує м'язова сила людини.
11 слайд

Опис слайду:
Так, наприклад, кінетична енергія хлопчика, що спокою щодо катера, дорівнює нулю в системі відліку, пов'язаної з катером, і відмінна від нуля, в системі відліку, пов'язаної з берегом.
12 слайд

Опис слайду:
3. Потенційна енергія Другим видом механічної енергії є потенційна енергія тіла. Термін «потенційна енергія» був запроваджений у 19 столітті шотландським інженером та фізиком Вільямом Джоном Ренкіном. Ренкін, Вільям Джон Потенційна енергія – це енергія системи, яка визначається взаємним розташуванням тіл (або частин тіла один щодо одного) та характером сил взаємодії між ними
13 слайд

Опис слайду:
Величину, рівну добутку маси тіла, прискорення вільного падіння і висоти тіла над нульовим рівнем, називають потенційною енергією тіла в гравітаційному полі. Робота сили тяжіння дорівнює втраті потенційної енергії тіла в гравітаційному полі Землі.
14 слайд

Опис слайду:
При зміні величини деформації сила пружності здійснює роботу, яка залежить від подовження пружини в початковому і кінцевому положенні. У правій частині рівності стоїть зміна величини зі знаком мінус. Таким чином, робота сили пружності дорівнює зміні потенційної енергії пружно деформованого тіла, взятому з протилежним знаком.
15 слайд

Опис слайду:
4. Закон збереження енергії Тіла можуть одночасно мати і кінетичну, і потенційну енергію. Так ось, суму кінетичної та потенційної енергії тіла називають повною механічною енергією тіла або просто механічною енергією. Чи можна змінити механічну енергію системи і, якщо можна, то як?
16 слайд

Опис слайду:
Розглянемо замкнуту систему «кубик – похила площина – Земля» Згідно з теоремою про кінетичну енергію, зміна кінетичної енергії кубика дорівнює роботі всіх сил, що діють на тіло.
17 слайд

Опис слайду:
Тоді отримуємо, що збільшення кінетичної енергії кубика відбувається за рахунок зменшення його потенційної енергії. Отже, сума змін кінетичної та потенційної енергії тіла дорівнює нулю. А це означає, що повна механічна енергія замкнутої системи тіл, що взаємодіють силами тяжіння, залишається постійною. (Такий же результат можна отримати і при дії сили пружності.) Це твердження є закон збереження енергії в механіці.
18 слайд

Опис слайду:
19 слайд

Опис слайду:
Одним із наслідків закону збереження та перетворення енергії є твердження про неможливість створення «вічного двигуна» - машини, яка могла б невизначено довго виконувати роботу, не витрачаючи при цьому енергії.
20 слайд

Опис слайду:
ЗАДАЧІ ДЛЯ ЗАКРІПЛЕННЯ ОТРИМАНИХ ЗНАНЬ Куля масою 20 г випущена під кутом 600 до горизонту з початковою швидкістю 600 м/с. Визначте кінетичну енергію кулі під час найвищого підйому. Пружина утримує двері. Для того щоб відкрити двері, розтягнувши пружину на 3 см, потрібно прикласти силу рівну 60 Н. Для того, щоб відкрити двері, потрібно розтягнути пружину на 8 см. Яку роботу необхідно здійснити, щоб відкрити закриті двері? Камінь кинутий із Землі вертикально нагору зі швидкістю 10 м/с. На якій висоті кінетична енергія каменю зменшиться у 5 разів у порівнянні з початковою кінетичною енергією
21 слайд

Опис слайду:
По горизонталі. 1. Одиниця енергії у системі СІ. 4. Тіло – класичний приклад для опису реактивного руху. 5. Фізична величина, що дорівнює роботі, виконаній в одиницю часу. 7. Властивість системи, необхідне збереження імпульсу чи енергії. 9. Значення слова "імпульс" у перекладі з латинської мови. 12. Загальне властивість низки величин, суть якого - незмінність величини у часі у замкнутої системі. 13. Одиниця потужності у системі СІ. По вертикалі. 2. Стан системи, в якому потенційна енергія дорівнює нулю, є нульовою... . 3. Загальна властивість для потенційної та кінетичної енергії, що виражає їхню залежність від вибору тіла відліку. 4. Фізична величина, що дорівнює добутку проекції сили на напрямок переміщення та модуля переміщення. 6. Фізична величина, що дорівнює добутку маси тіла на його швидкість. 8. Величина, яка збігається у напрямку імпульсу тіла. 9. Твердження, суть якого полягає в тому, що зміна кінетичної енергії дорівнює роботі рівнодіючої всіх сил, прикладених до тіла. 10. Одна із величин, від якої залежить зміна імпульсу тіла. 11. Розмір, що характеризує здатність тіла (системи) виконати роботу.
Імпульс тіла
Імпульсом тіла називається величина, що дорівнює добутку маси тіла на його швидкість.
Слід пам'ятати, що йдеться про тіло, яке можна подати як матеріальну точку. Імпульс тіла ($р$) називають також кількістю руху. Поняття кількості руху було запроваджено у фізику Рене Декартом (1596—1650). Термін «імпульс» виник пізніше (impulsus у перекладі з латинської означає «поштовх»). Імпульс є векторною величиною (як і швидкість) і виражається формулою:
$p↖(→)=mυ↖(→)$
Напрямок вектора імпульсу завжди збігається із напрямом швидкості.
За одиницю імпульсу СІ приймають імпульс тіла масою $1$ кг, що рухається зі швидкістю $1$ м/с, отже, одиницею імпульсу є $1$ кг $·$ м/с.
Якщо на тіло (матеріальну точку) діє постійна сила протягом проміжку часу $∆t$, то постійним буде прискорення:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
де, $(υ_1)↖(→)$ і $(υ_2)↖(→)$ — початкова та кінцева швидкості тіла. Підставивши це значення у вираз другого закону Ньютона, отримаємо:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Розкривши дужки та скориставшись виразом для імпульсу тіла, маємо:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Тут $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ — зміна імпульсу за час $∆t$. Тоді попереднє рівняння набуде вигляду:
$∆p↖(→)=F↖(→)∆t$
Вираз $∆p↖(→)=F↖(→)∆t$ є математичним записом другого закону Ньютона.
Твір сили на час її дії називають імпульсом сили. Тому зміна імпульсу точки дорівнює зміні імпульсу сили, що діє на неї.
Вираз $∆p↖(→)=F↖(→)∆t$ називається рівнянням руху тіла. Слід зауважити, що одна й та сама дія — зміна імпульсу точки — може бути отримана малою силою за великий проміжок часу і великою силою за малий проміжок часу.
Імпульс системи тел. Закон зміни імпульсу
Імпульсом (кількістю руху) механічної системи називається вектор, що дорівнює сумі імпульсів усіх матеріальних точок цієї системи:
$(p_(сист))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Закони зміни та збереження імпульсу є наслідком другого та третього законів Ньютона.
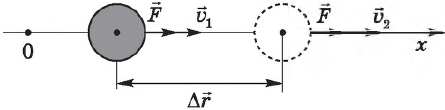
Розглянемо систему, що складається із двох тіл. Сили ($F_(12)$ і $F_(21)$ малюнку, із якими тіла системи взаємодіють між собою, називаються внутрішніми.
Нехай крім внутрішніх сил на систему діють зовнішні сили $(F_1)↖(→)$ і $(F_2)↖(→)$. Для кожного тіла можна записати рівняння $∆p↖(→)=F↖(→)∆t$. Склавши ліві та праві частини цих рівнянь, отримаємо:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Згідно з третім законом Ньютона $(F_(12))↖(→)=-(F_(21))↖(→)$.
Отже,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
У лівій частині стоїть геометрична сума змін імпульсів усіх тіл системи, що дорівнює зміні імпульсу самої системи — $(∆p_(сист))↖(→)$. ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ можна записати:
$(∆p_(сист))↖(→)=F↖(→)∆t$
де $F↖(→)$ — сума всіх зовнішніх сил, які діють тіло. Отриманий результат означає, що імпульс системи можуть змінити лише зовнішні сили, причому зміна імпульсу системи спрямоване так само, як зовнішня сумарна сила. У цьому вся суть закону зміни імпульсу механічної системи.
Внутрішні сили змінити сумарний імпульс системи що неспроможні. Вони лише змінюють імпульси окремих тіл системи.
Закон збереження імпульсу
З рівняння $(∆p_(сист))↖(→)=F↖(→)∆t$ випливає закон збереження імпульсу. Якщо на систему не діють ніякі зовнішні сили, то права частина рівняння $(∆p_(сист))↖(→)=F↖(→)∆t$ звертається в нуль, що означає незмінність сумарного імпульсу системи:
$(∆p_(сист))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Система, на яку не діють жодні зовнішні сили або рівнодіюча зовнішніх сил дорівнює нулю, називається замкнутої.
Закон збереження імпульсу говорить:
Сумарний імпульс замкнутої системи тіл залишається постійним за будь-яких взаємодій тіл системи між собою.
Отриманий результат справедливий для системи, що містить довільне число тел. Якщо сума зовнішніх сил не дорівнює нулю, але сума їх проекцій на якийсь напрямок дорівнює нулю, то проекція імпульсу системи на цей напрямок не змінюється. Так, наприклад, система тіл на поверхні Землі не може вважатися замкненою через силу тяжіння, що діє на всі тіла, однак сума проекцій імпульсів на горизонтальний напрямок може залишатися незмінною (за відсутності тертя), тому що в цьому напрямку сила тяжіння не діє.
Реактивний рух
Розглянемо приклади, що підтверджують справедливість закону збереження імпульсу.
Візьмемо дитячу гумову кульку, надуємо її і відпустимо. Ми побачимо, що коли повітря почне виходити з нього в один бік, сама кулька полетить в інший. Рух кульки є прикладом реактивного руху. Пояснюється воно законом збереження імпульсу: сумарний імпульс системи «кулька плюс повітря у ньому» до закінчення повітря дорівнює нулю; він повинен залишитися рівним нулю та під час руху; тому кулька рухається у бік, протилежну напрямку закінчення струменя, і з такою швидкістю, що його імпульс по модулю дорівнює імпульсу повітряного струменя.
Реактивним рухомназивають рух тіла, що виникає при відділенні від нього з якоюсь швидкістю деякої його частини. Внаслідок закону збереження імпульсу напрям руху тіла при цьому протилежно напрямку руху частини, що відокремилася.
На принципі реактивного руху засновано польоти ракет. Сучасна космічна ракета є дуже складним літальним апаратом. Маса ракети складається з маси робочого тіла (тобто розпечених газів, що утворюються в результаті згоряння палива і викидаються у вигляді реактивного струменя) і кінцевої, або, як кажуть, «сухої» маси ракети, що залишається після викиду з ракети робочого тіла.
Коли реактивний газовий струмінь з великою швидкістю викидається з ракети, сама ракета прямує у протилежний бік. Згідно із законом збереження імпульсу, імпульс $m_(p)υ_p$, що купується ракетою, повинен дорівнювати імпульсу $m_(газ)·υ_(газ)$ викинутих газів:
$m_(p)υ_p=m_(газ)·υ_(газ)$
Звідси випливає, що швидкість ракети
$υ_p=((m_(газ))/(m_p))·υ_(газ)$
З цієї формули видно, що швидкість ракети тим більше, чим більша швидкість газів, що викидаються, і відношення маси робочого тіла (тобто маси палива) до кінцевої («сухої») маси ракети.
Формула $υ_p=((m_(газ))/(m_p))·υ_(газ)$ є наближеною. У ній не враховується, що в міру згоряння палива маса ракети, що летить, стає все менше і менше. Точна формула для швидкості ракети була отримана в 1897 р. К. Е. Ціолковським і носить його ім'я.
Робота сили
Термін «робота» було введено у фізику 1826 р. французьким ученим Ж. Понселе. Якщо в повсякденному житті роботою називають лише працю людини, то у фізиці і, зокрема, у механіці прийнято вважати, що роботу здійснює сила. Фізичну величину роботи зазвичай позначають літерою $ А $.
Робота сили— це міра дії сили, яка залежить від її модуля та напряму, а також від переміщення точки докладання сили. Для постійної сили та прямолінійного переміщення робота визначається рівністю:
$A=F|∆r↖(→)|cosα$
де $F$ — сила, що діє тіло, $∆r↖(→)$ — переміщення, $α$ — кут між силою і переміщенням.

Робота сили дорівнює добутку модулів сили та переміщення та косинуса кута між ними, тобто скалярному добутку векторів $F↖(→)$ і $∆r↖(→)$.
Робота – величина скалярна. Якщо $α 0$, а якщо $90°
При дії на тіло кількох сил повна робота (сума робіт усіх сил) дорівнює роботі результуючої сили.
Одиницею роботи у СІ є джоуль($ 1 $ Дж). $1$ Дж — це робота, яку здійснює сила $1$ Н на шляху в $1$ м у напрямку дії цієї сили. Ця одиниця названа на честь англійського вченого Дж. Джоуля (1818-1889): $1$ Дж = $1$ Н $·$ м. Часто застосовуються також кілоджоулі та мілліджоулі: $1$ кДж $= 1 000$ Дж, $1$ мДж $= 0.001 $ Дж.
Робота сили тяжіння
Розглянемо тіло, що ковзає похилою площиною з кутом нахилу $α$ і висотою $Н$.

Виразимо $∆x$ через $H$ і $α$:
$∆x=(H)/(sinα)$
Враховуючи, що сила тяжіння $F_т=mg$ становить кут ($90° - α$) з напрямом переміщення, використовуючи формулу $∆x=(H)/(sin)α$, отримаємо вираз для роботи сили тяжіння $A_g$:
$A_g=mg·cos(90°-α)·(H)/(sinα)=mgH$
З цієї формули видно, що робота сили тяжіння залежить від висоти і залежить від кута нахилу площини.
Звідси слідує що:
- робота сили тяжіння залежить від форми траєкторії, якою рухається тіло, лише від початкового і кінцевого становища тіла;
- при переміщенні тіла по замкнутій траєкторії робота сили тяжіння дорівнює нулю, тобто сила тяжіння — консервативна сила (консервативними називаються сили, що мають таку властивість).
Робота сил реакції, дорівнює нулю, оскільки сила реакції ($N$) спрямована перпендикулярно до переміщення $∆x$.
Робота сили тертя
Сила тертя спрямована протилежно до переміщення $∆x$ і становить з ним кут $180°$, тому робота сили тертя негативна:
$A_(тр)=F_(тр)∆x·cos180°=-F_(тр)·∆x$
Оскільки $F_(тр)=μN, N=mg·cosα, ∆x=l=(H)/(sinα),$ то
$A_(тр)=μmgHctgα$
Робота сили пружності
Нехай на нерозтягнуту пружину довжиною $l_0$ діє зовнішня сила $F↖(→)$, розтягуючи її на $∆l_0=x_0$. У положенні $x=x_0F_(упр)=kx_0$. Після припинення дії сили $F↖(→)$ у точці $х_0$ пружина під дією сили $F_(упр)$ стискається.

Визначимо роботу сили пружності за зміни координати правого кінця пружини від $х_0$ до $х$. Оскільки сила пружності на цій ділянці змінюється лінійно, у законі Гука можна використовувати її середнє значення на цій ділянці:
$F_(упр.пор.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Тоді робота (з урахуванням того, що напрямки $(F_(упр.ср.))↖(→)$ і $(∆x)↖(→)$ збігаються) дорівнює:
$A_(упр)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Можна показати, що вигляд останньої формули залежить від кута між $(F_(упр.ср.))↖(→)$ і $(∆x)↖(→)$. Робота сил пружності залежить лише від деформацій пружини у початковому та кінцевому станах.
Таким чином, сила пружності, подібно до тяжкості, є консервативною силою.
Потужність сили
Потужність - фізична величина, що вимірюється ставленням роботи до проміжку часу, протягом якого вона зроблена.
Іншими словами, потужність показує, яка робота відбувається за одиницю часу (у СІ - за $ 1 $ с).
Потужність визначається формулою:
де $N$ - потужність, $А$ - робота, виконана за час $ ∆t $.
Підставивши у формулу $N=(A)/(∆t)$ замість роботи $A$ її вираз $A=F|(∆r)↖(→)|cosα$, отримаємо:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Потужність дорівнює добутку модулів векторів сили та швидкості на косинус кута між цими векторами.
Потужність у системі СІ вимірюється у ватах (Вт). Один ват ($1$ Вт) — це така потужність, за якої за $1$ з відбувається робота $1$ Дж: $1$ Вт $= 1$ Дж/с.
Ця одиниця названа у частину англійського винахідника Дж. Ватта (Уатта), який побудував першу парову машину. Сам Дж. Ватт (1736-1819) користувався іншою одиницею потужності - кінською силою (к. с.), яку він ввів для того, щоб можна було порівнювати працездатності парової машини та коня: $ 1 $ к.с. $ = 735.5 $ Вт.
У техніці часто застосовуються більші одиниці потужності — кіловат і мегават: $1$ кВт $= 1000$ Вт, $1$ МВт $= 1000000$ Вт.
Кінетична енергія. Закон зміни кінетичної енергії
Якщо тіло або кілька тіл, що взаємодіють між собою (система тіл) можуть виконувати роботу, то кажуть, що вони мають енергію.
Слово «енергія» (від грец. energia — дія, діяльність) нерідко вживається у побуті. Так, наприклад, людей, які можуть швидко виконувати роботу, називають енергійними, які мають велику енергію.
Енергія, яку має тіло внаслідок руху, називається кінетичною енергією.
Як і у випадку визначення енергії взагалі, про кінетичну енергію можна сказати, що кінетична енергія — це здатність тіла, що рухається, виконувати роботу.
Знайдемо кінетичну енергію тіла масою $m$, що рухається зі швидкістю $υ$. Оскільки кінетична енергія - це енергія, обумовлена рухом, нульовим станом для неї є стан, в якому тіло спочиває. Знайшовши роботу, необхідну повідомлення тілу даної швидкості, ми знайдемо його кінетичну енергію.
Для цього підрахуємо роботу на ділянці переміщення $∆r↖(→)$ при збігу напрямків векторів сили $F↖(→)$ та переміщення $∆r↖(→)$. У цьому випадку робота дорівнює
де $∆x=∆r$
Для руху точки з прискоренням $α=const$ вираз для переміщення має вигляд:
$∆x=υ_1t+(at^2)/(2),$
де $ υ_1 $ - Початкова швидкість.
Підставивши в рівняння $A=F·∆x$ вираз для $∆x$ з $∆x=υ_1t+(at^2)/(2)$ і скориставшись другим законом Ньютона $F=ma$, отримаємо:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Виразивши прискорення через початкову $υ_1$ і кінцеву $υ_2$ швидкості $a=(υ_2-υ_1)/(t)$ і підставивши $A=ma(υ_1t+(at^2)/(2))=(mat)/ (2)(2υ_1+at)$ маємо:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Прирівнявши тепер початкову швидкість до нуля: $υ_1=0$, отримаємо вираз для кінетичної енергії:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Таким чином, тіло, що рухається, володіє кінетичною енергією. Ця енергія дорівнює роботі, яку необхідно зробити, щоб збільшити швидкість тіла від нуля до $υ$.
З $E_K=(mυ)/(2)=(p^2)/(2m)$ випливає, що робота сили по переміщенню тіла з одного положення до іншого дорівнює зміні кінетичної енергії:
$A=E_(K_2)-E_(K_1)=∆E_K$
Рівність $A=E_(K_2)-E_(K_1)=∆E_K$ виражає теорему про зміну кінетичної енергії.
Зміна кінетичної енергії тіла(матеріальної точки) за деякий проміжок часу дорівнює роботі, виконаної за цей час силою, що діє на тіло.
Потенційна енергія
Потенційною енергією називається енергія, яка визначається взаємним розташуванням тіл, що взаємодіють, або частин одного і того ж тіла.
Оскільки енергія визначається як здатність тіла виконувати роботу, то потенційну енергію, природно, визначають як роботу сили, яка залежить тільки від взаємного розташування тіл. Такою є робота сили тяжіння $A=mgh_1-mgh_2=mgH$ і робота сили пружності:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Потенційною енергією тіла,взаємодіє із Землею, називають величину, рівну добутку маси $m$ цього тіла на прискорення вільного падіння $g$ і на висоту $h$ тіла над поверхнею Землі:
Потенційною енергією пружно деформованого тіла називають величину, що дорівнює половині добутку коефіцієнта пружності (жорсткості) $k$ тіла на квадрат деформації $∆l$:
$E_p=(1)/(2)k∆l^2$
Робота консервативних сил (тяжкості та пружності) з урахуванням $E_p=mgh$ і $E_p=(1)/(2)k∆l^2$ виражається так:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Ця формула дозволяє дати загальне визначення потенційної енергії.
Потенційною енергією системи називається залежна від становища тіл величина, зміна якої при переході системи з початкового стану в кінцеве і роботі внутрішніх консервативних сил системи, взятої з протилежним знаком.
Знак «мінус» у правій частині рівняння $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ означає, що при виконанні роботи внутрішніми силами (наприклад, падіння тіла на землю під дією сили тяжіння в системі "камінь - Земля") енергія системи зменшується. Робота та зміна потенційної енергії у системі завжди мають протилежні знаки.
Оскільки робота визначає лише зміна потенційної енергії, то фізичний зміст у механіці має лише зміну енергії. Тому вибір нульового рівня енергії довільний і визначається виключно міркуваннями зручності, наприклад, простотою запису відповідних рівнянь.
Закон зміни та збереження механічної енергії
Повна механічна енергія системиназивається сума її кінетичної та потенційної енергій:
Вона визначається положенням тіл (потенційна енергія) та їх швидкістю (кінетична енергія).
Відповідно до теореми про кінетичну енергію,
$E_k-E_(k_1)=A_p+A_(пр),$
де $А_р$ - робота потенційних сил, $А_(пр)$ - робота непотенційних сил.
У свою чергу робота потенційних сил дорівнює різниці потенційної енергії тіла в початковому $Е_(р_1)$ і кінцевому $Е_р$ станах. Враховуючи це, отримаємо вираз для закону зміни механічної енергії:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(пр)$
де ліва частина рівності – зміна повної механічної енергії, а права – робота непотенційних сил.
Отже, закон зміни механічної енергіїговорить:
Зміна механічної енергії системи дорівнює роботі всіх непотенційних сил.
Механічна система, у якій діють лише потенційні сили, називається консервативною.
У консервативній системі $А_(пр) = 0$. звідси випливає закон збереження механічної енергії:
У замкнутій консервативній системі повна механічна енергія зберігається (не змінюється з часом):
$E_k+E_p=E_(k_1)+E_(p_1)$
Закон збереження механічної енергії виводиться із законів механіки Ньютона, які застосовуються для системи матеріальних точок (або макрочасток).
Проте закон збереження механічної енергії справедливий і системи мікрочастинок, де самі закони Ньютона не діють.
Закон збереження механічної енергії є наслідком однорідності часу.
Однорідність часуполягає в тому, що при однакових початкових умовах перебіг фізичних процесів не залежить від того, в який час ці умови створені.
Закон збереження повної механічної енергії означає, що при зміні кінетичної енергії в консервативній системі повинна змінюватись і її потенційна енергія, тому їхня сума залишається постійною. Це означає можливість перетворення одного виду енергії на інший.
Відповідно до різних форм руху матерії розглядають різні види енергії: механічну, внутрішню (рівну сумі кінетичної енергії хаотичного руху молекул щодо центру мас тіла та потенційної енергії взаємодії молекул один з одним), електромагнітну, хімічну (яка складається з кінетичної енергії руху електронів та електричної енергії їх взаємодії один з одним і з атомними ядрами), ядерну та ін. Зі сказаного видно, що розподіл енергії на різні видидосить умовно.
Явища природи зазвичай супроводжуються перетворенням одного виду енергії на інший. Так, наприклад, тертя частин різних механізмів призводить до перетворення механічної енергії на тепло, тобто в внутрішню енергію.У теплових двигунах, навпаки, відбувається перетворення внутрішньої енергії на механічну; в гальванічних елементах хімічна енергія перетворюється на електричну тощо.
Нині поняття енергії одна із основних понять фізики. Це поняття нерозривно пов'язане з уявленням про перетворення однієї форми руху на іншу.
Ось як у сучасній фізиці формулюється поняття енергії:
Енергія - загальна кількісна міра руху та взаємодії всіх видів матерії. Енергія не виникає з нічого і не зникає, вона може лише переходити з однієї форми до іншої. Поняття енергії пов'язує докупи всі явища природи.
Прості механізми. ККД механізмів
Простими механізмами називаються пристосування, що змінюють величину чи напрям прикладених до тіла сил.
Вони використовуються для переміщення або підйому великих вантажів за допомогою невеликих зусиль. До них відносяться важіль та його різновиди - блоки (рухомий і нерухомий), комір, похила площина та її різновиди - клин, гвинт та ін.
Важіль. Правило важеля
Важель є твердим тілом, здатним обертатися навколо нерухомої опори.

Правило важеля свідчить:
Важель знаходиться в рівновазі, якщо прикладені до нього сили обернено пропорційні їх плечам:
$(F_2)/(F_1)=(l_1)/(l_2)$
З формули $(F_2)/(F_1)=(l_1)/(l_2)$, застосувавши до неї властивість пропорції (твір крайніх членів пропорції дорівнює добутку її середніх членів), можна отримати таку формулу:
Але $F_1l_1=M_1$ - момент сили, що прагне повернути важіль за годинниковою стрілкою, а $F_2l_2=M_2$ - момент сили, що прагне повернути важіль проти годинникової стрілки. Таким чином, $M_1=M_2$, що потрібно було довести.
Важель почав застосовуватися людьми в давнину. З його допомогою вдавалося піднімати важкі кам'яні плити при будівництві пірамід Стародавньому Єгипті. Без важеля це було б неможливо. Адже, наприклад, для зведення піраміди Хеопса, що має висоту $147$ м, було використано понад два мільйони кам'яних брил, найменша з яких мала масу $2.5$ тонн!
У наш час важелі знаходять широке застосування як у виробництві (наприклад, підйомні крани), і у побуті (ножиці, кусачки, ваги).
Нерухомий блок
Дія нерухомого блоку аналогічна дії важеля з рівними плечима: $l_1=l_2=r$. Прикладена сила $F_1$ дорівнює навантаженню $F_2$, і умова рівноваги має вигляд:
Нерухомий блокзастосовують, коли потрібно змінити напрямок сили, не змінюючи її величину.
Рухомий блок
Рухомий блок діє аналогічно важелю, плечі якого становлять $l_2=(l_1)/(2)=r$. При цьому умова рівноваги має вигляд:
де $F_1$ - прикладена сила, $F_2$ - навантаження. Застосування рухомого блоку дає виграш чинності вдвічі.
Поліспаст (система блоків)

Звичайний поліспаст складається з $n$ рухомих і $n$ нерухомих блоків. Його застосування дає виграш у силі в $2n$ разів:
$F_1=(F_2)/(2n)$
Ступіньний поліспастскладається з рухомих і одного нерухомого блоку. Застосування статечного поліспасту дає виграш у силі в $2^n$ разів:
$F_1=(F_2)/(2^n)$

Гвинт
Гвинт є похилою площиною, навитою на вісь.
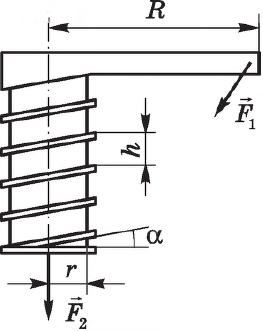
Умова рівноваги сил, що діють на гвинт, має вигляд:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

де $F_1$ - зовнішня сила, прикладена до гвинта і діюча на відстані $R$ від його осі; $F_2$ - сила, що діє у напрямку осі гвинта; $ h $ - крок гвинта; $r$ - середній радіус різьблення; $α$ - Кут нахилу різьблення. $R$ — довжина важеля (гайкового ключа), що обертає гвинт із силою $F_1$.
Коефіцієнт корисної дії
Коефіцієнт корисної дії (ККД) - ставлення корисної роботи до всієї витраченої роботи.
Коефіцієнт корисної дії часто виражають у відсотках та позначають грецькою літерою $η$ («ця»):
$η=(A_п)/(A_3)·100%$
де $А_п$ - корисна робота, $А_3$ - вся витрачена робота.
Корисна робота завжди становить лише частину повної роботи, яку витрачає людина, використовуючи той чи інший механізм.
Частина досконалої роботи витрачається подолання сил тертя. Оскільки $А_3 > А_п$, ККД завжди менше $1$ (або $< 100%$).
Оскільки кожну з робіт у цій рівності можна виразити у вигляді твору відповідної сили на пройдений шлях, то його можна переписати так: $F_1s_1≈F_2s_2$.
Звідси слідує що, виграючи за допомогою механізму в силі, ми в стільки ж разів програємо в дорозі, і навпаки. Цей закон називають золотим правилом механіки.
Золоте правило механіки є наближеним законом, оскільки в ньому не враховується робота з подолання тертя та сили тяжіння частин використовуваних пристроїв. Тим не менш, воно буває дуже корисним при аналізі роботи будь-якого простого механізму.

Так, наприклад, завдяки цьому правилу відразу можна сказати, що робітнику, зображеному на малюнку, при дворазовому виграші в силі підйому вантажу на $10$ см доведеться опустити протилежний кінець важеля на $20$.
Зіткнення тел. Пружний та непружний удари
Закони збереження імпульсу та механічної енергії застосовуються для вирішення задачі про рух тіл після зіткнення: за відомими імпульсами та енергіями до зіткнення визначаються значення цих величин після зіткнення. Розглянемо випадки пружного та непружного ударів.
Абсолютно непружним називається удар, після якого тіла утворюють єдине тіло, що рухається з певною швидкістю. Завдання про швидкість останнього вирішується за допомогою закону збереження імпульсу системи тіл з масами $m_1$ і $m_2$ (якщо йдеться про два тіла) до і після удару:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Очевидно, що кінетична енергія тіл при непружному ударі не зберігається (наприклад, при $(υ_1)↖(→)=-(υ_2)↖(→)$ і $m_1=m_2$ вона дорівнює нулю після удару).
Абсолютно пружним називається удар, при якому зберігається не тільки сума імпульсів, а й сума кінетичних енергій тіл, що ударяються.
Для абсолютно пружного удару справедливі рівняння
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
де $m_1, m_2$ - маси куль, $υ_1, υ_2$ -швидкості куль до удару, $υ"_1, υ"_2$ -швидкості куль після удару.