Центр важкості твердого тіла. Способи знаходження центру важкості
Якщо тверде тіло знаходиться поблизу Землі, то до кожної матеріальної точки цього тіла прикладена сила тяжіння. При цьому розміри тіла в порівнянні з розміром Землі настільки малі, що сили земного тяжіння, що діють на всі частинки тіла, можна вважати паралельними між собою
Центр (точка З) системи паралельних сил тяжкості всіх точок тіла називається центром тяжкості твердого тіла а сума сил тяжкості всіх його матеріальних точок називається силою тяжіння , що діє на нього
Координати центру важкості твердого тіла визначаються за формулами:
де - координати точок докладання сил тяжіння, що діють на k-ю матеріальну точку.
Для однорідного тіла:
де V – об'єм всього тіла;
V k- обсяг k-ї частки.
Для однорідної тонкої пластини:
![]()
де S – площа пластини;
S k –площа k-ой частини пластини.
Для лінії:
де L- Довжина всієї лінії;
L k- Довжина k-ї частини лінії.
Способи визначення координат центрів тяжіння тіл:
Теоретичні
Симетрія.Якщо однорідне тіло має площину, вісь чи центр симетрії, його центр тяжкості лежить відповідно чи площині симетрії, чи осі, чи центрі симетрії.
Розбиття.Якщо тіло можна розбити на кінцеве число таких частин, кожної з яких положення центру тяжкості відомо, то координати центру тяжкості всього тіла можна безпосередньо обчислити за наведеними вище формулами.
Доповнення.Цей спосіб є окремим випадком способу розбиття. Він застосовується до тіл, що мають вирізи, якщо центри ваги тіла без вирізу та вирізаної частини відомі. До розрахунків їх включають зі знаком «-».
Інтегрування. Коли тіло не можна розбити на складові, центри тяжкості яких відомі, використовують метод інтегрування, що є універсальним.
Експериментальні
Метод підвішування.Тіло підвішують за дві-три крапки, проводячи з них вертикалі. Крапка їх перетині – центр мас.
Метод зважування. Тіло різними частинами поміщають на ваги, визначаючи цим опорні реакції. Складають рівняння рівноваги, у тому числі визначають координати центру тяжкості.
 За допомогою теоретичних методів виведено формули для визначення координат центру важкості
найбільш поширених однорідних тіл:
За допомогою теоретичних методів виведено формули для визначення координат центру важкості
найбільш поширених однорідних тіл:
Дуга кола
Будь-яке тіло можна як сукупність матеріальних точок, як яких можна, наприклад, брати молекули. Нехай тіло складається з n матеріальних точок масами m1, m2, ...mn.
Центром мас тіла, що складається з n матеріальних точок, називається точка (у геометричному сенсі), радіус-вектор якої визначається формулою:
Тут R1 - радіус-вектор точки з номером i (i = 1, 2, ... n).
Це визначення виглядає незвично, але насправді воно дає положення того самого центру мас, про який ми маємо інтуїтивне уявлення. Наприклад, центр мас стрижня перебуватиме у його середині. Сума мас усіх точок, що входить у знаменник вищезазначеної формули, називається масою тіла. Масою тіланазивається сума мас усіх його точок: m = m1 + m2 + ... + mn.

У симетричних однорідних тілах ЦМ завжди розташований у центрі симетрії або лежить на осі симетрії, якщо фігура центру симетрії не має. Центр мас може перебувати як усередині тіла (диск, квадрат, трикутник), так і поза ним (кільце, рамка, косинець).
Для людини становище ЦМ залежить від прийнятої пози. У багатьох видах спорту важливим доданком успіху є здатність зберігати рівновагу. Так, у спортивній гімнастиці, акробатиці
велика кількістьелементів включають різні видирівноваги. Важлива здатність зберігати рівновагу у фігурному катанні, у бігу на ковзанах, де опора має дуже малу площу.
Умовами рівноваги тіла, що покоїться, є одночасна рівність нулю суми сил і суми моментів сил, що діють на тіло.
З'ясуємо, яке положення має займати вісь обертання, щоб тіло, що закріплене на ній, залишалося в рівновазі під дією сил тяжіння. Для цього розіб'ємо тіло на безліч маленьких шматочків і намалюємо сили тяжіння, що діють на них.

Відповідно до правила моментів для рівноваги необхідно, щоб сума моментів усіх цих сил щодо осі дорівнювала нулю.
Можна показати, що для кожного тіла існує єдина точка, де сума моментів сил тяжіння щодо будь-якої осі, що проходить через цю точку, дорівнює нулю. Ця точка називається центром тяжіння (зазвичай збігається із центром мас).
Центром тяжкості тіла (ЦТ)називається точка, щодо якої сума моментів сил тяжіння, що діє на всі частинки тіла, дорівнює нулю.
Таким чином, сили тяжіння не викликають обертання тіла навколо центру тяжіння. Тому всі сили тяжіння можна було б замінити єдиною силою, яка прикладена до цієї точки і дорівнює силі тяжіння.
Для вивчення рухів тіла спортсмена часто вводиться термін загального центру тяжкості (ОЦТ). Основні властивості центру тяжкості:
Якщо тіло закріплене на осі, що проходить через центр тяжіння, то сила тяжіння не викликатиме його обертання;
Центр тяжкості є точкою застосування сили тяжіння;
У однорідному полі центр тяжкості збігається із центром мас.
Рівноважним називається таке положення тіла, при якому воно може залишатися в спокої як завгодно довго. При відхиленні тіла від положення рівноваги сили, що діють на нього, змінюються, і рівновага сил порушується.
Існують різні види рівноваги (рис. 9). Прийнято розрізняти три види рівноваги: стійке, нестійке та байдуже.
Стійка рівновага (рис. 9, а) характеризується тим, що тіло повертається в початкове положення при його відхиленні. У разі виникають сили, чи моменти сил, прагне повернути тіло у вихідне становище. Прикладом може бути положення тіла з верхньою опорою (наприклад, вис на перекладині), коли за будь-яких відхиленнях тіло прагне повернутися у початкове положення.
Абстрактна рівновага (рис. 9, б) характеризується тим, що при зміні положення тіла не виникає сил або моментів сил, які прагнуть повернути тіло в початкове положення або ще більше видалити тіло від нього. Це випадок, що рідко спостерігається у людини. Прикладом може бути стан невагомості на космічному кораблі.
Нестійка рівновага (рис. 9, в) спостерігається тоді, коли при малих відхиленнях тіла виникають сили або моменти сил, які прагнуть ще більше відхилити тіло від початкового положення. Такий випадок можна спостерігати, коли людина, стоячи на опорі дуже малої площі (значно меншої площі його двох ніг або навіть однієї ноги), відхиляється убік.
Малюнок 9. Рівновагу тіла: стійке (а), байдуже (б), нестійке (в)

Поряд з перерахованими видами рівноваги тіл у біомеханіці розглядають ще один вид рівноваги – обмежено-стійку. Цей вид рівноваги відрізняється тим, що тіло може повернутися в початкове положення при відхиленні від нього до певної межі, наприклад, що визначається межею площі опори. Якщо ж відхилення переходить цю межу, рівновага стає нестійкою.
Основне завдання у забезпеченні рівноваги тіла людини у тому, щоб проекція ОЦМ тіла перебувала межах площі опори. Залежно від виду діяльності (збереження статичного становища, ходьба, біг тощо) і вимог до стійкості частота та швидкість коригуючих впливів змінюються, але процеси збереження рівноваги однакові.
Розподіл маси у тілі людини
Маса тіла та маси окремих сегментів дуже важливі для різних аспектів біомеханіки. У багатьох видах спорту необхідно знати розподіл маси для вироблення правильної техніки виконання вправ. Для аналізу рухів тіла людини використовується метод сегментування: воно умовно розсікається певні сегменти. Для кожного сегмента визначаються його маса та положення центру мас. У табл. 1 визначено маси частин тіла у відносних одиницях.
Таблиця 1. Маси частин тіла у відносних одиницях
Часто замість поняття центру мас використовують інше поняття – центр тяжкості. У однорідному полі тяжкості центр тяжіння завжди збігається із центром мас. Положення центру тяжкості ланки вказують як відстань від осі проксимального суглоба і виражають щодо довжини ланки, прийнятої за одиницю.
У табл. 2 наведено анатомічне положення центрів тяжкості різних ланок тіла.
Таблиця 2. Центри важкості частин тіла
| Частина тіла | Положення центру важкості |
| Стегна | 0,44 довжини ланки |
| Гомілка | 0,42 довжини ланки |
| Плечо | 0,47 довжини ланки |
| Передпліччя | 0,42 довжини ланки |
| Тулуб | |
| Голова | |
| Пензель | |
| Стопа | |
| Плечо | 0,47 довжини ланки |
| Передпліччя | 0,42 довжини ланки |
| Тулуб | 0,44 відстані від поперечної осі плечових суглобів до осі тазостегнових |
| Голова | Розташована в області турецького сідла клиноподібної кістки (проекція спереду між бровами, збоку – на 3,0 – 3,5 вище за зовнішній слуховий прохід) |
| Пензель | В області голівки третьої п'ясткової кістки |
| Стопа | На прямій, що з'єднує п'ятковий бугор кістки п'яти з кінцем другого пальця на відстані 0,44 від першої точки |
| Загальний центр ваги при вертикальному положенні тіла | Розташований при основній стійці в області малого таза, попереду крижів |
Виділимо у неоднорідному твердому тілі елементарний об'єм dV = dx dy dz (рис.5.3). Вага виділеного елемента буде , де - Питома вага в точці тіла з відповідними координатами.
Ваги елементів утворюють систему сил, паралельних осі аплікату. Модуль рівнодіючої
ваг елементів називається вагоютвердого тіла, а геометрична точка докладання рівнодіючої – центром тяжіннятверде тіло. Для обчислення цих величин скористаємося формулами (5.1) та (5.4), замінивши у них підсумовування інтегруванням за обсягом, тобто
Величина, що стоїть у чисельнику формули (5.8), називається статичним моментом ваги твердого тіла щодо координатної площини.
Очевидно, що для однорідного тіла формула (5.8) набуває вигляду
Структура формул для обчислення та аналогічна.
І тут центр тяжкості твердого тіла збігається центром його обсягу.
Якщо один із розмірів твердого тіла суттєво менше двох інших, тіло називають важкою поверхнею. При постійній вазі одиниці площі поверхні вона є однорідною. Формули для обчислення ваги та координат центру ваги виходять із (5.7) – (5.9) заміною інтегралів за обсягом на інтеграли по поверхні. У деяких випадках поверхня може бути плоскою.
Якщо два розміри твердого тіла істотно менші за третій, тіло називають важкою лінією. При постійній вазі одиниці довжини лінії вона є однорідною. Формули для обчислення ваги та координат центру ваги виходять із (5.7) – (5.9) заміною інтегралів за обсягом на криволінійні інтеграли. У деяких випадках лінія може бути прямою.
Якщо однорідне тверде тіло має площину симетрії, то центр ваги тіла лежить у цій площині (сума статичних моментів елементарних сил ваги щодо площини симетрії дорівнює нулю).
Якщо тверде однорідне тіло має дві площини симетрії, то центр тяжкості тіла належить лінії перетину цих площин.
Якщо тверде однорідне тіло має три площини симетрії, то центр ваги тіла розташований в точці їх перетину.
Якщо тверде тіло може бути подумки розчленовано на елементи, ваги та положення центрів тяжіння яких відомі, то обчислення ваги твердого тіла та положення його центру тяжіння може бути виконано за формулами (5.1) та (5.4). Так, наприклад, розраховуються вага і координати центру тяжкості судна, що будується.
Якщо тіло має вирізи, вони можуть бути враховані як елементи негативної ваги.
Зауважимо, що в інженерній довідковій літературі наводиться досить велика кількість однорідних елементів (об'ємних, плоских та криволінійних), для яких розраховані ваги та положення центрів тяжіння. Нижче в таблиці наведено деякі з них.
| Тип елемента | Об'єм (площа) елемента | Абсцис ц.т. | Ордината ц.т. | Аплікату ц.т. |
У деяких ситуаціях положення центру важкості твердого тіла може бути знайдено за результатами експерименту. Наприклад, при підвішуванні тіла на нитки його центр тяжіння розташовується на лінії нитки. Підвісивши тіло за іншу точку, що не лежить на першій лінії, знайдемо положення центру ваги тіла як точку перетину двох ліній. Іншим способом, що застосовується для знаходження центру тяжкості протяжних тіл, є так звана постановка його на «ножі» з паралельними лезами. При зближенні «ножів» центр ваги тіла прагне залишитися з-поміж них і, межі, опиняється лінії збігу лез.
В інженерній практиці визначення положення центру тяжкості тіла можуть застосовуватися способи, що є комбінацією розрахунку та експерименту. Як приклад наведемо обчислення видалення центру тяжкості літака, зображеного на рис.5.4. від його переднього колеса.
На малюнку: Д-динометр, що показує величину сили нормального тиску переднього колеса, P – вага літака, – відстань від переднього колеса до осі задніх коліс.
Очевидно, що відстань від переднього колеса до лінії сили ваги літака, що цікавить, може бути отримано з рівняння суми моментів сил і P щодо осі задніх коліс, як
Примітка: якщо вага Р літака не відома, то, переставивши динамометр Д під задні колеса, можна отримати величину сили нормального тиску . Тоді
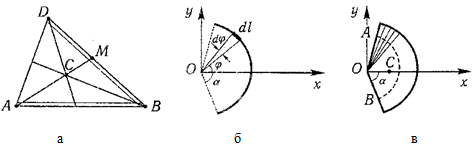
Приклад 5.1. Для однорідної пластини, має форму кругового сектора з кутом 2 при вершині (див. рис. 5.5), знайти положення центру ваги пластини.
Проведемо вісь абсцис так, щоб вона була бісектрисою кута 2 . Тоді, з симетрії, ордината центру тяжкості дорівнює нулю, тобто. .
Двома радіусами, елементарний кут між якими виділимо на пластині елемент, площа якого приблизно дорівнює площі рівнобедреного трикутника
Абсцис центру тяжкості виділеного трикутного елемента дорівнює.
Тепер можна скласти вираз для обчислення абсциси центру тяжкості кругового сектора як
Примітка: при обчисленні враховано, що центр тяжкості однорідного плоского тіла має на площині самі координати, що й у відповідної плоскої фігури.
Приклад 5.2. Для тонкої однорідної пластини складної форми, розміри якої вказано на рис.5.6, знайти положення центру тяжіння.
Подумки розчленуємо пластину на три елементи: прямокутник, трикутник і коло. Для кожного з елементів знайдемо площу та координати центру тяжіння:
Тоді для пластини координати центру ваги можна обчислити за формулами:
При обчисленні отвір трактувалося як приєднання кола негативної ваги.
Центром тяжкостітвердого тіла називається геометрична точка, що жорстко пов'язана з цим тілом, і є центром паралельних сил тяжіння, прикладених до окремих елементарних частинок тіла (рисунок 1.6).
Радіус-вектор цієї точки

Малюнок 1.6
Для однорідного тіла положення центру ваги тіла залежить від матеріалу, а визначається геометричної формою тіла.
Якщо питома вага однорідного тіла γ , вага елементарної частинки тіла
P k = γΔV k (P = γV ) підставити у формулу для визначення r C , маємо
Звідки, проеціюючи на осі та переходячи до межі, отримуємо координати центру тяжкості однорідного обсягу

Аналогічно для координат центру ваги однорідної поверхні площею S (Рисунок 1.7, а)


Малюнок 1.7
Для координат центру ваги однорідної лінії завдовжки L (Малюнок 1.7, б)

Способи визначення координат центру тяжіння
Виходячи з отриманих раніше загальних формул, можна вказати способи визначення координат центрів важкості твердих тіл:
1 Аналітичний(шляхом інтегрування).
2 Метод симетрії. Якщо тіло має площину, вісь чи центр симетрії, його центр тяжкості лежить відповідно у площині симетрії, осі симетрії чи центрі симетрії.
3 Експериментальний(Метод підвішування тіла).
4 Розбиття. Тіло розбивається на кінцеве число частин, кожної з яких становище центру тяжкості C та площа S відомі. Наприклад, проекцію тіла на площину xOy (рисунок 1.8) можна подати у вигляді двох плоских фігур з площами S 1 і S 2 (S = S 1 + S 2 ). Центри тяжкості цих фігур перебувають у точках C 1 (x 1 , y 1 ) і C 2 (x 2 , y 2 ) . Тоді координати центру ваги тіла дорівнюють


Малюнок 1.8
5Доповнення(Метод негативних площ або обсягів). Окремий випадок способу розбиття. Він застосовується до тіл, що мають вирізи, якщо центри ваги тіла без вирізу та вирізаної частини відомі. Наприклад, необхідно знайти координати центру тяжіння плоскої фігури (рисунок 1.9):


Малюнок 1.9
Центри тяжкості найпростіших фігур
Малюнок 1.10
1 Трикутник
Центр тяжкості площі трикутник збігається з точкою перетину медіан (рисунок 1.10, а).
DM = MB , CM = (1/3)AM .
2 Дуга кола
Дуга має вісь симетрії (рисунок 1.10 б). Центр тяжкості лежить цієї осі, тобто. y C = 0 .

dl - Елемент дуги, dl = Rdφ , R - Радіус кола, x = Rcosφ , L = 2αR ,
Отже:
x C = R(sinα/α) .
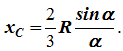
3 Круговий сектор
Сектор радіусу R з центральним кутом 2 α має вісь симетрії Ox , де знаходиться центр тяжіння (рисунок 1.10, в).
Розбиваємо сектор на елементарні сектори, які можна вважати трикутниками. Центри тяжкості елементарних секторів розташовуються на дузі кола радіусу (2/3) R .
Центр тяжкості сектора збігається із центром тяжіння дуги AB :
14. Способи завдання руху точки.
При векторному способі завдання руху положення точки визначається радіус-вектором, проведеним з нерухомої точки у вибраній системі відліку.
При координатному способі завдання руху задаються координати точки як функції часу:

Це параметричні рівняння траєкторії точки, що рухається, в яких роль параметра грає час t . Щоб записати її рівняння у явній формі, треба виключити з них t .
При природному способі завдання руху задаються траєкторія точки, початок відліку на траєкторії із зазначенням позитивного напрямку відліку, закон зміни дугової координати: s = s (t) . Цим способом зручно користуватися, якщо траєкторія точки наперед відома.
15. 1.2 Швидкість точки
Розглянемо переміщення точки за короткий проміжок часу Δt :
![]()
середня швидкість точки за проміжок часу Dt . Швидкість точки в даний моментчасу


Швидкість точки– це кінематична міра її руху, рівна похідної за часом від радіус-вектора цієї точки в системі відліку, що розглядається. Вектор швидкості спрямований по траєкторії до точки в бік руху.
Першим відкриттям Архімеда у механіці було запровадження поняття центру тяжкості, тобто. доказ того, що у будь-якому тілі є єдина точка, в якій можна зосередити його вагу, не порушивши рівноважного стану.
Центр тяжкості тіла - точка твердого тіла, через яку проходить рівнодіюча всіх сил тяжіння, що діють на елементарні маси цього тіла за будь-якого його положення в просторі.
Центром тяжкості механічної системиназивається точка, щодо якої сумарний момент сил тяжіння, що діють на всі тіла системи, дорівнює нулю.
Простіше кажучи, центр ваги- Це точка, до якої прикладена сила тяжіння незалежно від положення самого тіла. Якщо тіло однорідне, центр вагизазвичай розташований у геометричному центрі тіла. Таким чином, центр тяжкості у однорідному кубі або однорідній кулі збігається з геометричним центром цих тіл.
Якщо розміри тіла малі проти радіусом Землі, можна вважати, що сили тяжкості всіх частинок тіла утворюють систему паралельних сил. Їх рівнодіюча називається силою тяжіння, а центр цих паралельних сил – центром тяжкості тіла.Координати центру тяжкості тіла можуть бути визначені за формулами (рис. 7.1):
 ,
,  ,
,  ,
,
де  – вага тіла x i, y i, z i– координати елементарної частки, вагою Р i;.
– вага тіла x i, y i, z i– координати елементарної частки, вагою Р i;.
Формули визначення координат центру тяжкості тіла є точними, лише при розбиванні тіло на нескінченне число нескінченно малих елементарних частинок вагою Р i. Якщо ж число частинок, куди подумки розбите тіло, кінцеве, то загальному випадку ці формули будуть наближеними, оскільки координати x i , y i , z iпри цьому можуть бути визначені лише з точністю до розмірів частинок. Чим менше ці частинки, тим меншою буде помилка, яку ми зробимо при обчисленні координат центру тяжіння. До точних виразів можна дійти лише результаті граничного переходу, коли розмір кожної частки прагне нулю, а кількість їх необмежено зростає. Як відомо, така межа називається певним інтегралом. Тому фактичне визначення координат центрів тяжкості тіл у загальному випадку потребує заміни сум відповідними їм інтегралами та застосування методів інтегрального обчислення.
Якщо маса всередині твердого тіла або механічної системи розподіляється неоднорідно, то центр тяжіння зміщується в ту частину, де воно важче.
Центр тяжкості тіла не завжди навіть може знаходитись усередині самого тіла. Так, наприклад, центр тяжкості бумеранга знаходиться десь посередині між краями бумеранга, але поза самим тілом бумерангу.
Для кріплення вантажів положення центру ваги дуже важливе. Саме в цю точку прикладено сили тяжіння та інерційні сили, що діють на вантаж у процесі руху. Чим вище знаходиться центр ваги тіла або механічної системи, тим більше воно схильна до перекидання.
Центр тяжкості тіла збігається із центром мас.