Центр тяжести твердого тела. Способы нахождения центра тяжести
Если твердое тело находится вблизи поверхности Земли, то к каждой материальной точке этого тела приложена сила тяжести. При этом размеры тела по сравнению с размером Земли настолько малы, что силы земного притяжения, действующие на все частицы тела, можно считать параллельными между собой
Центр (точка С ) системы параллельных сил тяжести всех точек тела называется центром тяжести твердого тела , а сумма сил тяжести всех его материальных точек называется силой тяжести , действующей на него
Координаты центра тяжести твердого тела определяются по формулам:
где - координаты точек приложения сил тяжести , действующих на k -ю материальную точку.
Для однородного тела:
где V - объем всего тела;
V k - объем k -й частицы.
Для однородной тонкой пластины:
![]()
где S – площадь пластины;
S k – площадь k- ой части пластины.
Для линии:
где L - длина всей линии;
L k - длина k -ой части линии.
Способы определения координат центров тяжести тел:
Теоретические
Симметрия. Если однородное тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно или в плоскости симметрии, или на оси, или в центре симметрии.
Разбиение. Если тело можно разбить на конечное число таких частей, для каждой из которых положение центра тяжести известно, то координаты центра тяжести всего тела можно непосредственно вычислить по выше приведенным формулам.
Дополнение. Этот способ является частным случаем способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. В расчеты их включают со знаком «-».
Интегрирование . Когда тело нельзя разбить на составные части, центры тяжести которых известны, используют метод интегрирования, являющийся универсальным.
Экспериментальные
Метод подвешивания. Тело подвешивают за две-три точки, проводя из них вертикали. Точка их пересечении – центр масс.
Метод взвешивания . Тело разными частями помещают на весы, определяя тем самым опорные реакции. Составляют уравнения равновесия, из которых определяют координаты центра тяжести.
 С помощью теоретических методов выведены формулы для определения координат центра тяжести
наиболее распространенных однородных тел:
С помощью теоретических методов выведены формулы для определения координат центра тяжести
наиболее распространенных однородных тел:
Дуга окружности
Любое тело можно рассматривать как совокупность материальных точек, в качестве которых можно, например, брать молекулы. Пусть тело состоит из n материальных точек с массами m1, m2, ...mn.
Центром масс тела , состоящего из n материальных точек, называется точка (в геометрическом смысле), радиус-вектор которой определяется формулой :
Здесь R1 – радиус-вектор точки с номером i (i = 1, 2, ... n).
Это определение выглядит непривычно, но на самом деле оно даёт положение того самого центра масс, о котором у нас имеется интуитивное представление. Например, центр масс стержня будет находиться в его середине. Сумма масс всех точек, входящая в знаменатель вышеопределённой формулы, называется массой тела. Массой тела называется сумма масс всех его точек : m = m1 + m2 + ... + mn .

В симметричных однородных телах ЦМ всегда расположен в центре симметрии или лежит на оси симметрии, если у фигуры центра симметрии нет. Центр масс может находиться как внутри тела (диск, квадрат, треугольник), так и вне его (кольцо, рамка, угольник).
Для человека положение ЦМ зависит от принятой позы. Во многих видах спорта важным слагаемым успеха является способность сохранять равновесие. Так, в спортивной гимнастике, акробатике
большое количество элементов включат в себя разные виды равновесия. Важна способность сохранять равновесие в фигурном катании, в беге на коньках, где опора имеет очень малую площадь.
Условиями равновесия покоящегося тела являются одновременное равенство нулю суммы сил и суммы моментов сил , действующих на тело.
Выясним, какое положение должна занимать ось вращения, чтобы закреплённое на ней тело оставалось в равновесии под действием сил тяжести. Для этого разобьём тело на множество маленьких кусочков и нарисуем действующие на них силы тяжести.

В соответствии с правилом моментов для равновесия необходимо, чтобы сумма моментов всех этих сил относительно оси равнялась нулю.
Можно показать, что для каждого тела существует единственная точка, где сумма моментов сил тяжести относительно любой оси, проходящей через эту точку, равна нулю. Эта точка называется центром тяжести (обычно совпадает с центром масс).
Центром тяжести тела (ЦТ) называется точка, относительно которой сумма моментов сил тяжести, действующей на все частицы тела, равна нулю .
Таким образом, силы тяжести не вызывают вращения тела вокруг центра тяжести. Поэтому все силы тяжести можно было бы заменить единственной силой, которая приложена к этой точке и равна силе тяжести.
Для изучения движений тела спортсмена часто вводится термин общий центр тяжести (ОЦТ). Основные свойства центра тяжести:
Если тело закреплено на оси, проходящей через центр тяжести, то сила тяжести не будет вызывать его вращения;
Центр тяжести является точкой приложения силы тяжести;
В однородном поле центр тяжести совпадает с центром масс.
Равновесным называется такое положение тела, при котором оно может оставаться в покое сколь угодно долго. При отклонении тела от положения равновесия, силы, действующие на него, изменяются, и равновесие сил нарушается.
Существуют различные виды равновесия (рис. 9). Принято различать три вида равновесия: устойчивое, неустойчивое и безразличное.
Устойчивое равновесие (рис. 9, а) характеризуется тем, что тело возвращается в первоначальное положение при его отклонении. В таком случае возникают силы, или моменты сил, стремящаяся возвратить тело в исходное положение. Примером может служить положение тела с верхней опорой (например, вис на перекладине), когда при любых отклонениях тело стремится возвратиться в начальное положение.
Безразличное равновесие (рис. 9, б) характеризуется тем, что при изменении положения тела не возникает сил или моментов сил, стремящихся возвратить тело в начальное положение или ещё более удалить тело от него. Это редко наблюдаемый у человека случай. Примером может служить состояние невесомости на космическом корабле.
Неустойчивое равновесие (рис. 9, в) наблюдается тогда, когда при малых отклонениях тела возникают силы или моменты сил, стремящихся ещё больше отклонить тело от начального положения. Такой случай можно наблюдать, когда человек, стоя на опоре очень малой площади (значительно меньшей площади его двух ног или даже одной ноги), отклоняется в сторону.
Рисунок 9. Равновесие тела : устойчивое (а), безразличное (б), неустойчивое (в)

Наряду с перечисленными видами равновесия тел в биомеханике рассматривают ещё один вид равновесия – ограниченно-устойчивое. Этот вид равновесия отличается тем, что тело может вернуться в начальное положение при отклонении от него до некоторого предела, например, определяемого границей площади опоры. Если же отклонение переходит этот предел, равновесие становится неустойчивым.
Основная задача при обеспечении равновесия тела человека состоит в том, чтобы проекция ОЦМ тела находилась в пределах площади опоры. В зависимости от вида деятельности (сохранение статического положения, ходьба, бег и т. п.) и требований к устойчивости частота и быстрота корригирующих воздействий изменяются, но процессы сохранения равновесия одинаковы.
Распределение массы в теле человека
Масса тела и массы отдельных сегментов очень важны для различных аспектов биомеханики. Во многих видах спорта необходимо знать распределение массы для выработки правильной техники выполнения упражнений. Для анализа движений тела человека используется метод сегментирования: оно условно рассекается на определённые сегменты. Для каждого сегмента определяются его масса и положение центра масс. В табл. 1 определены массы частей тела в относительных единицах.
Таблица 1. Массы частей тела в относительных единицах
Часто вместо понятия центра масс используют другое понятие – центр тяжести. В однородном поле тяжести центр тяжести всегда совпадает с центром масс. Положение центра тяжести звена указывают как его расстояние от оси проксимального сустава и выражают относительно длины звена, принятой за единицу.
В табл. 2 приведены анатомическое положение центров тяжести различных звеньев тела.
Таблица 2. Центры тяжести частей тела
| Часть тела | Положение центра тяжести |
| Бедро | 0,44 длины звена |
| Голень | 0,42 длины звена |
| Плечо | 0,47 длины звена |
| Предплечье | 0,42 длины звена |
| Туловище | |
| Голова | |
| Кисть | |
| Стопа | |
| Плечо | 0,47 длины звена |
| Предплечье | 0,42 длины звена |
| Туловище | 0,44 расстояния от поперечной оси плечевых суставов до оси тазобедренных |
| Голова | Расположена в области турецкого седла клиновидной кости (проекция спереди между бровями, сбоку – на 3,0 – 3,5 выше наружного слухового прохода) |
| Кисть | В области головки третьей пястной кости |
| Стопа | На прямой, соединяющей пяточный бугор пяточной кости с концом второго пальца на расстоянии 0,44 от первой точки |
| Общий центр масс тяжести при вертикальном положении тела | Расположен при основной стойке в области малого таза, впереди крестца |
Выделим в неоднородном твердом теле элементарный объем dV=dx dy dz (рис.5.3). Вес выделенного элемента будет , где – удельный вес в точке тела с соответствующими координатами.
Веса элементов образуют систему сил, параллельных оси аппликат. Модуль равнодействующей
весов элементов называется весом твердого тела, а геометрическая точка приложения равнодействующей – центром тяжести твердого тела. Для вычисления этих величин воспользуемся формулами (5.1) и (5.4), заменив в них суммирование интегрированием по объему, то есть
Величина, стоящая в числителе формулы (5.8), называется статическим моментом веса твердого тела относительно координатной плоскости .
Очевидно, что для однородного тела формула (5.8) принимает вид
Структура формул для вычисления и аналогичная.
В этом случае центр тяжести твердого тела совпадает центром его объема.
Если один из размеров твердого тела существенно меньше двух других, тело называют тяжелой поверхностью . При неизменном весе единицы площади поверхности она является однородной. Формулы для вычисления веса и координат центра тяжести получаются из (5.7) – (5.9) заменой интегралов по объему на интегралы по поверхности. В некоторых случаях поверхность может быть плоской.
Если два размера твердого тела существенно меньше третьего, тело называют тяжелой линией . При неизменном весе единицы длины линии она является однородной. Формулы для вычисления веса и координат центра тяжести получаются из (5.7) – (5.9) заменой интегралов по объему на криволинейные интегралы. В некоторых случаях линия может быть прямой.
Если однородное твердое тело имеет плоскость симметрии, то центр тяжести тела лежит в этой плоскости (сумма статических моментов элементарных сил веса относительно плоскости симметрии равна нулю).
Если однородное твердое тело имеет две плоскости симметрии, то центр тяжести тела принадлежит линии пересечения этих плоскостей.
Если однородное твердое тело имеет три плоскости симметрии, то центр тяжести тела расположен в точке их пересечения.
Если твердое тело может быть мысленно расчленено на элементы, веса и положения центров тяжести которых известны, то вычисление веса твердого тела и положения его центра тяжести может быть выполнено по формулам (5.1) и (5.4). Так, например, рассчитываются вес и координаты центра тяжести строящегося судна.
Если тело имеет вырезы, то они могут быть учтены как элементы отрицательного веса.
Заметим, что в инженерной справочной литературе приводится достаточно большое количество однородных элементов (объемных, плоских и криволинейных), для которых рассчитаны веса и положения центров тяжести. Ниже в таблице приведены некоторые из них.
| Вид элемента | Объем (площадь) элемента | Абсцисса ц.т. | Ордината ц.т. | Аппликата ц.т. |
В некоторых ситуациях положение центра тяжести твердого тела может быть найдено по результатам эксперимента. Например, при подвешивании тела на нити, его центр тяжести располагается на линии нити. Подвесив тело за другую точку, не лежащую на первой линии, найдем положение центра тяжести тела как точку пересечения двух линий. Другим способом, применяемым для нахождения центра тяжести протяженных тел, является так называемая постановка его на «ножи» с параллельными лезвиями. При сближении «ножей» центр тяжести тела стремится остаться между ними и, в пределе, оказывается на линии совпадения лезвий.
В инженерной практике для определения положения центра тяжести тела могут применяться способы, являющиеся комбинацией расчета и эксперимента. В качестве примера приведем вычисление удаления центра тяжести самолета, изображенного на рис.5.4., от его переднего колеса.
На рисунке: Д- динамометр, показывающий величину силы нормального давления переднего колеса, P – вес самолета, – расстояние от переднего колеса до оси задних колес.
Очевидно, что интересующее расстояние от переднего колеса до линии силы веса самолета может быть получено из уравнения суммы моментов сил и P относительно оси задних колес, как
Замечание: если вес Р самолета не известен, то, переставив динамометр Д под задние колеса, можно получить величину силы нормального давления . Тогда
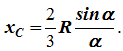
Пример 5.1. Для однородной пластины, имеющей форму кругового сектора с углом 2 при вершине (см. рис. 5.5), найти положение центра тяжести пластины.
Проведем ось абсцисс так, что бы она являлась биссектрисой угла 2 . Тогда, в силу симметрии, ордината центра тяжести равна нулю, т.е. .
Двумя радиусами, элементарный угол между которыми , выделим на пластине элемент, площадь которого приближенно равна площади равнобедренного треугольника
Абсцисса центра тяжести выделенного треугольного элемента равна .
Теперь можно составить выражение для вычисления абсциссы центра тяжести кругового сектора как
Замечание: при вычислении учтено, что центр тяжести однородного плоского тела имеет на плоскости те же координаты, что и у соответствующей плоской фигуры.
Пример 5.2. Для тонкой однородной пластины сложной формы, размеры которой указаны на рис.5.6, найти положение центра тяжести.
Мысленно расчленим пластину на три элемента: прямоугольник, треугольник и круг. Для каждого из элементов найдем площадь и координаты центра тяжести:
Тогда для пластины координаты центра тяжести можно вычислить по формулам:
При вычислении отверстие трактовалось как присоединение круга отрицательного веса.
Центром тяжести твердого тела называется геометрическая точка, жестко связанная с этим телом, и являющаяся центром параллельных сил тяжести, приложенных к отдельным элементарным частицам тела (рисунок 1.6).
Радиус-вектор этой точки

Рисунок 1.6
Для однородного тела положение центра тяжести тела не зависит от материала, а определяется геометрической формой тела.
Если удельный вес однородного тела γ , вес элементарной частицы тела
P k = γΔV k (P = γV ) подставить в формулу для определения r C , имеем
Откуда, проецируя на оси и переходя к пределу, получаем координаты центра тяжести однородного объема

Аналогично для координат центра тяжести однородной поверхности площадью S (рисунок 1.7, а)


Рисунок 1.7
Для координат центра тяжести однородной линии длиной L (рисунок 1.7, б)

Способы определения координат центра тяжести
Исходя из полученных ранее общих формул, можно указать способы определения координат центров тяжести твердых тел:
1 Аналитический (путем интегрирования).
2 Метод симметрии . Если тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.
3 Экспериментальный (метод подвешивания тела).
4 Разбиение . Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести C и площадь S известны. Например, проекцию тела на плоскость xOy (рисунок 1.8) можно представить в виде двух плоских фигур с площадями S 1 и S 2 (S = S 1 + S 2 ). Центры тяжести этих фигур находятся в точках C 1 (x 1 , y 1 ) и C 2 (x 2 , y 2 ) . Тогда координаты центра тяжести тела равны


Рисунок 1.8
5Дополнение (метод отрицательных площадей или объемов). Частный случай способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Например, необходимо найти координаты центра тяжести плоской фигуры (рисунок 1.9):


Рисунок 1.9
Центры тяжести простейших фигур
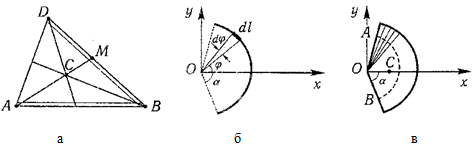
Рисунок 1.10
1 Треугольник
Центр тяжести площади треугольник совпадает с точкой пересечения его медиан (рисунок 1.10, а).
DM = MB , CM = (1/3)AM .
2 Дуга окружности
Дуга имеет ось симметрии (рисунок 1.10, б). Центр тяжести лежит на этой оси, т.е. y C = 0 .

dl – элемент дуги, dl = Rdφ , R – радиус окружности, x = Rcosφ , L = 2αR ,
Следовательно:
x C = R(sinα/α) .
3 Круговой сектор
Сектор радиуса R с центральным углом 2α имеет ось симметрии Ox , на которой находится центр тяжести (рисунок 1.10, в).
Разбиваем сектор на элементарные секторы, которые можно считать треугольниками. Центры тяжести элементарных секторов располагаются на дуге окружности радиуса (2/3)R .
Центр тяжести сектора совпадает с центром тяжести дуги AB :
14. Способы задания движения точки.
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
При координатном способе задания движения задаются координаты точки как функции времени:

Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t . Чтобы записать ее уравнение в явной форме, надо исключить из них t .
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t) . Этим способом удобно пользоваться, если траектория точки заранее известна.
15. 1.2 Скорость точки
Рассмотрим перемещение точки за малый промежуток времени Δt :
![]()
средняя скорость точки за промежуток времени Dt . Скорость точки в данный момент времени


Скорость точки – это кинематическая мера ее движения, равная производной по времени от радиус-вектора этой точки в рассматриваемой системе отсчета. Вектор скорости направлен по касательной к траектории точки в сторону движения.
Первым открытием Архимеда в механике было введение понятия центра тяжести, т.е. доказательство того, что в любом теле есть единственная точка, в которой можно сосредоточить его вес, не нарушив равновесного состояния.
Центр тяжести тела – точка твердого тела, через которую проходит равнодействующая всех сил тяжести, действующих на элементарные массы этого тела при любом его положении в пространстве.
Центром тяжестимеханической системы называется точка, относительно которой суммарный момент сил тяжести, действующих на все тела системы, равен нулю.
Проще говоря, центр тяжести – это точка, к которой приложена сила тяжести независимо от положения самого тела. Если тело однородное, центр тяжести обычно расположен в геометрическом центре тела. Таким образом, центр тяжести в однородном кубе или однородном шаре совпадает с геометрическим центром этих тел.
Если размеры тела малы по сравнению с радиусом Земли, то можно считать, что силы тяжести всех частиц тела образуют систему параллельных сил. Их равнодействующая называется силой тяжести , а центр этих параллельных сил – центром тяжести тела .Координаты центра тяжести тела могут быть определены по формулам (рис. 7.1):
 ,
,  ,
,  ,
,
где  – вес телаx i
, y i
, z i
– координаты элементарной частицы, весом Р i
;.
– вес телаx i
, y i
, z i
– координаты элементарной частицы, весом Р i
;.
Формулы для определения координат центра тяжести тела являются точными, строго говоря, лишь при разбиении тело на бесконечное число бесконечно малых элементарных частиц весом Р i . Если же число частиц, на которые мысленно разбито тело, конечное, то в общем случае эти формулы будут приближенными, так как координаты x i , y i , z i при этом могут быть определены лишь с точностью до размеров частиц. Чем меньше эти частицы, тем меньше будет ошибка, которую мы сделаем при вычислении координат центра тяжести. К точным выражениям можно прийти лишь в результате предельного перехода, когда размер каждой частицы стремится к нулю, а число их неограниченно возрастает. Как известно, такой предел называется определенным интегралом. Поэтому фактическое определение координат центров тяжести тел в общем случае требует замены сумм соответствующими им интегралами и применения методов интегрального исчисления.
Если масса внутри твердого тела или механической системы распределяется неоднородно, то центр тяжести смещается в ту часть, где оно тяжелее.
Центр тяжести тела не всегда даже может находиться внутри самого тела. Так, например, центр тяжести бумеранга находится где-то посередине между оконечностей бумеранга, но вне самого тела бумеранга.
Для крепления грузов положение центра тяжести очень важно. Именно в эту точку приложены силы тяжести и инерционные силы, действующие на груз в процессе движения. Чем выше находится центр тяжести тела или механической системы, тем более оно склонно к опрокидыванию.
Центр тяжести тела совпадает с центром масс.